Благодаря своим конструктивным особенностям соосный вертолет имеет неограниченные возможности в реализации «плоского» разворота, превосходящие возможности одновинтовых вертолетов. Особенности конструкции обеспечивают концентрацию на соосном винте всех важнейших функций: создание подъемной и пропульсивной (движущей) силы, продольного, поперечного и путевого управления и управления общим шагом.
Путевое управление вертолетом с соосным несущим винтом осуществляется при использовании разницы моментов вращения на верхнем и нижнем винтах (рис. 4). Это приводит к тому, что система управления в целом становится практически независимой от угла скольжения. Именно эго обстоятельство, а также отсутствие рулевого винта позволяет соосному вертолету выполнять «плоский» разворот с большими углами скольжения.
Для одновинтового вертолета «плоский» разворот принципиально невозможен. На одновинтовом вертолете допустимые углы скольжения существенно ограничиваются наличием рулевого винта. Дело в том, что изменение угла скольжения приводит к изменению угла атаки рулевого винта, условий его работы и махового движения его лопастей, особенно на больших скоростях полета. Увеличение амплитуды махового движения лопастей рулевого винта сверх допустимой является прямой угрозой безопасности полета. Это обусловлено тем, что на рулевых винтах отсутствуют автоматы перекоса, а предотвращение чрезмерного роста амплитуды махового движения обеспечивается только регулятором взмаха, возможности которого ограничены. Поэтому при росте амплитуды махового движения сверх допустимой возможны удары лопастей рулевого винта о балку. Кроме того, с ростом амплитуды махового движения растут нагрузки в элементах конструкции рулевого винта, что также накладывает ограничения на углы скольжения.
На соосных вертолетах допустимы значительные углы скольжения. Как мы уже говорили, это объясняется отсутствием рулевого винта и независимостью системы путевого управления от угла скольжения. Хвостовое оперение соосного вертолета не накладывает каких-либо ограничений на величину угла скольжения, так как рассчитано на изменение угла скольжения в диапазоне до 180°.
«Плоский» разворот был отработан на боевом вертолете Ка-50. При этом в диапазоне скоростей от 90 до 100 км/ч этот маневр можно выполнять в пределах скольжений (поворотов по курсу) до 180° как вправо, так и влево, а на больших скоростях (до 230 км/ч) – в пределах 90°, при этом крен вертолета близок к нулю. «Плоский» разворот на большие углы (рис. 5) является сугубо боевым маневром и обеспечивает направление неподвижного оружия вертолета в сторону цели в кратчайшее время. Использование «плоского» разворота дает боевому вертолету неограниченные преимущества в бою против любого противника – как наземного, так и воздушного. Именно из-за отсутствия рулевого винта на соосном вертолете имеется возможность выполнять маневры с большей эффективностью, которая реализуется путем отклонения педалей до упоров с максимально возможным темпом и созданием угловых скоростей рыскания без каких- либо ограничений.
На одновинтовом вертолете эффективность путевого управления избыточна. Это связано с необходимостью обеспечения путевой балансировки во всем диапазоне изменения мощности силовой установки. Однако эта эффективность не может быть полностью реализована в полете. Ограничение угловых скоростей вращения на этих вертолетах вызвано необходимостью предотвращения попадания рулевого винта в режим вихревого кольца, а также условиями прочности хвостовой балки, рулевого винта и трансмиссии.
На соосных вертолетах путевое управление является гармоничным и сбалансированным, при этом обеспечивается оптимальная степень эффективности путевого управления. Руль направления увеличивает эффективность путевого управления соразмерно возрастающим аэродинамическим моментам планера при увеличении скорости полета. Пилотируя соосный вертолет, летчики быстро привыкают к новым условиям и убеждаются, что на нем можно выполнять маневры, недоступные одновинтовому вертолету.
На режимах снижения, близких к режиму самовращения, и при неизменной частоте вращения несущих винтов у соосных вертолетов отмечается некоторое снижение эффективности путевого управления. Необходимая степень эффективности путевого управления на этих режимах обеспечивается также благодаря рулям направления. Для увеличения эффективности путевого управления на соосных вертолетах используется также перенастройка частоты вращения несущих винтов с уменьшением ее на 3-4%.
Отсутствие рулевого винта на соосном вертолете дает летчику возможность осуществлять управление по курсу путем отклонения педалей до упоров с максимально возможным темпом, что обеспечивает кратчайшее время разворота на данный угол. Это хорошо видно на рис. 6, где отражены параметры движения при выполнении соосным и одновинтовым вертолетами разворотов на режиме висения. Соосный вертолет имеет большое преимущество перед одновинтовым по темпу нарастания и по максимальной величине угловой скорости разворота, а также большой запас путевого управления на висении, в том числе на статическом потолке, независимо от барометрической высоты. Это преимущество переходит в значительное тактическое превосходство и обеспечивает выигрыш в дуэльной ситуации.
На одновинтовом вертолете с ростом высоты полета или с ростом температуры наружного воздуха из-за уменьшения избытка мощности силовой установки и увеличения шага рулевого винта существенно уменьшается располагаемый ход путевого управления, а следовательно, и эффективность разворота: на потолке висения, где используется вся располагаемая мощность, одновинтовой вертолет не может совершать развороты без потери высоты.
Рис. 5. Атака на встречных курсах
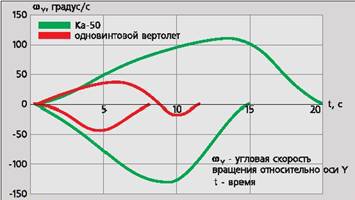
Рис 6. Угловая скорость вращения вертолета относительно вертикальной оси на режиме висения
Маневры с использованием вертикальных и тангенциальных перегрузок обеспечивают изменение траектории и скорости полета вертолета. По принятой терминологии, обычно эти маневры подразделяются на вертикальные («горки», пикирования и др.), горизонтальные (виражи, форсированные виражи, разгоны, торможения и др.), пространственные (восходящие и нисходящие спирали, боевые развороты, повороты на «горке», развороты на пикировании) и др.
Маневренные возможности вертолетов характеризуются, с одной стороны, допустимым уровнем перегрузок, а с другой – способностью эффективно их реализовывать. Параметры несущей системы для соосных и одновинтовых вертолетов одного класса определяют из одинакового уровня допустимых перегрузок. Сравнение же располагаемых перегрузок требует особого рассмотрения.
Маневры в вертикальной плоскости. При выполнении вертикальных маневров существенно изменяется скорость полета, что сказывается на характеристиках маневренности. Вывод вертолета на заданную вертикальную перегрузку обеспечивается, как правило, увеличением угла тангажа и, соответственно, угла атаки несущего винта. При этом темп роста перегрузки прямо связан с темпом роста угла тангажа, то есть – с возможностями системы продольного управления, ее эффективностью и мощностью. Чем выше эффективность продольного управления, тем быстрее изменяются угол тангажа и перегрузка. При этом за время роста перегрузки скорость полета не успевает существенно уменьшиться, что увеличивает эффективность маневра. В случае недостаточной эффективности управления при выполнении маневра скорость полета уменьшается быстрее, чем растет перегрузка, при этом могут возникнуть проблемы достижения заданных перегрузок.
Эффективность и мощность продольного управления у соосного вертолета значительно выше, чем у одновинтового. Это обеспечивается меньшими моментами инерции (см. рис. 2) и большими располагаемыми моментами управления, что объясняется большим значением плеч сил, приложенных к втулкам верхнего и нижнего винтов относительно центра масс аппарата. На рис. 7 показаны статистические зависимости максимального располагаемого продольного ускорения от массы соосного и одновинтового вертолетов. Благодаря большей мощности управления на соосном вертолете увеличение угла тангажа и перегрузки происходит значительно быстрее, поэтому выход на максимальную перегрузку осуществляется быстрее и с незначительным уменьшением скорости полета. На одновинтовом вертолете, вследствие того, что процесс вывода на перегрузку затянут, имеет место заметное падение скорости и, следовательно, достигается меньший уровень максимальной перегрузки. Таким образом, соосный вертолет, обладая большей эффективностью и мощностью продольного управления, имеет существенно большие располагаемые перегрузки.