Ввод соосного вертолета в пикирование выполняется эффективнее и безопаснее, чем одновинтового. Дело в том, что при вводе в пике требуется дать ручку от себя, при этом вертикальная перегрузка существенно уменьшается, происходит соответствующее искривление траектории и растет угловая скорость фюзеляжа на пикирование. В процессе гашения этой угловой скорости для перехода в установившееся пикирование пилот берет ручку на себя.
При этом маховое движение лопастей развивается быстрее, чем изменяется угловая скорость фюзеляжа. Если изменение угловой скорости фюзеляжа оказывается недостаточным из-за малой эффективности продольного управления (как, например, у одновинтового вертолета), то вследствие встречного относительного движения хвостовой балки и лопастей возможно их опасное сближение и даже соударение. На вертолетах соосной схемы подобные явления невозможны. Таким образом, выполнение маневров с уменьшением вертикальной перегрузки на соосном вертолете более эффективно и безопасно.
Маневры в горизонтальной плоскости. Среди горизонтальных маневров целесообразно выделить маневры прямолинейные и криволинейные. Наиболее часто выполняются разгоны и торможения в горизонтальной плоскости, особенно при выполнении боевой задачи в полетах у земли. Возможность быстрого перемещения у земли из одной точки в другую резко повышает выживаемость вертолета при выполнении им боевых действий.
В качестве примера рассмотрим разгоны с режима висения (направление любое – вперед, назад, вправо, влево). Эти маневры можно оценить следующими параметрами: максимальным ускорением разгона при использовании избытка мощности, максимально допустимыми скоростями перемещения и временем выхода ка эти скорости.
Больший избыток мощности из-за отсутствия рулевого винта и более высокое аэродинамическое качество соосных винтов по сравнению с одиночным позволяют соосному летательному аппарату выполнять разгон с режима висения с максимальным ускорением и гораздо быстрее разгоняться до заданной скорости. Это повышает как боевые возможности винтокрылой машины, так и ее выживаемость.
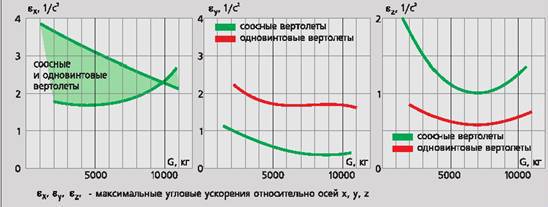
Рис 7. Максимальны* располагаемые ускорения соосных и одновинтовых вертолетов
Максимально допустимые скорости полета вбок и назад тоже характеризуют маневренность, так как в итоге определяют быстроту перемещения вертолета из одной точки в другую, что особенно важно в условиях боя. Скорость перемещения соосного вертолета в любом направлении с режима висения ограничивается только максимальными располагаемыми ходами в системе управления винтами. На одновинтовом вертолете наличие рулевого винта накладывает существенное ограничение на скорость перемещения вбок с режима висения вследствие возможности попадания рулевого винта в режим вихревого кольца.
Следует особо остановиться на криволинейных маневрах в горизонтальной плоскости. Здесь необходимо отметить возможность выполнения на соосных вертолетах принципиально нового маневра – «воронки» (рис. 8). Тактический смысл применения «воронки» заключается в том, что при ее выполнении вертолет может длительное время держать в зоне прицеливания наземные цели и производить по ним стрельбу, несмотря на отрицательный угол тангажа. На одновинтовом вертолете выдерживание отрицательного угла тангажа приводит к разгону, уходу от цели и новым заходам на нее, что снижает вероятность поражения цели.
«Воронка» – это сугубо боевой маневр, который выполняется на скорости 100-180 км/ч с отрицательным углом тангажа до 30-35° и, по существу, является боковым виражом, при котором углы крена и тангажа меняются местами. При выполнении маневра составляющая тяги винта, параллельная горизонтальной плоскости, направлена к центру «воронки». Эта сила уравновешивается инерционными силами, возникающими при движении вертолета по траектории, близкой к круговой с углом скольжения 90°. Таким образом, выполнение «воронки» на соосном вертолете основано на его способности совершать глубокие скольжения и перемещения вбок с большими скоростями.
Боевым маневром, который применяется для быстрого изменения направления движения, является и форсированный вираж. Он может быть эффективен при атаке наземных целей и в воздушном бою при атаке на встречных курсах (см. рис. 5). На соосных вертолетах обеспечивается существенно большая интенсивность выполнения форсированных виражей. Это объясняется отсутствием ограничений по угловой скорости вращения и возможностью выполнения форсированного виража с глубоким (до 60°) скольжением. Этими возможностями соосный вертолет обладает благодаря отсутствию рулевого винта.
Соосные вертолеты имеют преимущества и при выполнении всех пространственных маневров, особенно при выполнении маневров типа поворота на «горке», когда необходимо развивать большие угловые скорости и использовать глубокие скольжения.
Кроме вышеперечисленных маневров, на соосных вертолетах успешно выполняются такие фигуры высшего пилотажа, как косая петля, кувырок, восходящая бочка и др. При их выполнении на соосных машинах углы тангажа достигают 90°, крены – 130-140°.
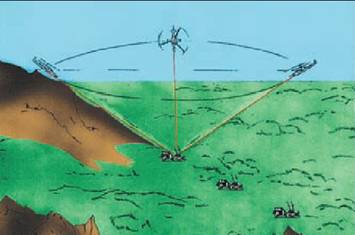
Рис. 8. Боевой маневр «воронка»
Анализ статистических материалов, полученных на основе летных испытаний, показывает, что при одинаковой нагрузке на квадратный метр ометаемой несущим винтом площади минимальные вертикальные скорости снижения на режиме авторотации у соосных вертолетов несколько меньше, чем у одновинтовых вертолетов. Это объясняется наличием на соосной несущей системе бипланового эффекта, уменьшающего индуктивные потери мощности. Кроме того, на режиме авторотации, несмотря на малую тягу, рулевой винт одновинтового вертолета потребляет определенную мощность, что также приводит к увеличению вертикальной скорости снижения одновинтовых вертолетов.
Сравнение показывает, что минимальная вертикальная скорость боевого соосного вертолета, имеющего нагрузку на ометаемую площадь 57 кгс/м? , на 8-10% больше, чем вертикальная скорость одновинтового вертолета с нагрузкой 43 кгс/м?. Однако на посадочных характеристиках вертолетов эта разница не сказывается по следующим причинам:
– благодаря аэродинамической симметрии соосного вертолета, отсутствию в каналах управления перекрестных связей типа «общий шаг – педали» не происходит существенной разбалансировки машины в пространстве при переходе от моторного полета на режим авторотации;
– посадочные скорости соосных вертолетов на режиме авторотации примерно на 15 км/ч меньше, чем одновинтовых. Это объясняется более низким (на 20-30 м) энергичным выравниванием машин с большими (до 10°) углами тангажа, что обеспечивается более высокой мощностью продольного управления и меньшими габаритами планера. Меньшие посадочные скорости увеличивают безопасность посадки, особенно на пересеченную местность.
Путевая управляемость соосных вертолетов на режиме авторотации обеспечивается за счет развитого вертикального хвостового оперения и разности крутящих моментов на винтах. «Руководство по летной эксплуатации» содержит рекомендации по уменьшению частоты вращения несущего винта на 3-4% для выполнения планирования на авторотации и посадки с малыми поступательными скоростями движения. При сохранении скорости планирования это приводит к уменьшению на 2-3 м/с вертикальной скорости снижения. Одновременно возникающая на несущих винтах разность моментов сопротивления вращению приводит к увеличению эффективности путевого управления и улучшению посадочных характеристик.
На фирме КАМОВ, в ЛИИ, ГНИКИ ВВС, ЦАГИ был проведен большой объем модельных и летных исследований соосных вертолетов и винтов на режиме «вихревого кольца». В процессе летных испытаний соосных летательных аппаратов этот режим впервые был исследован летчиком-испытателем нашего ОКБ Д.К. Ефремовым на вертолете на Ка-15. В дальнейшем этот режим выполнялся при испытаниях вертолетов Ка-25 (в ГНИКИ) и Ка-26 (в ЛИИ).