При определенных значениях полетных масс частота вращения несущего винта приближается к 66 %, то есть к ограничению по этому параметру, а в процессе «подрыва» происходит ее уменьшение ниже допустимой величины. Эту особенность необходимо учесть при выполнении посадок на авторотации.

Рис. 2. Зависимость вертикальной скорости приземления при выполнении посадки на авторотации вертолета Ми-26 от полетной массы
Для следования требованиям норм прочности и создания безопасных зазоров между лопастями и хвостовой балкой уменьшение общего шага НВ после посадки должно быть таким, чтобы обеспечить его минимальное значение (1°) только при частотах вращения несущего винта, заведомо меньших 50 %. Минимальное значение общего шага несущего винта должно быть достигнуто только после срабатывания центробежных ограничителей свеса, когда угол взмаха лопасти вниз ограничивается величиной -2° (минимальный угол взмаха лопастей вниз до срабатывания центробежных ограничителей свеса составляет -6°).
Выполнению посадок с выключенными двигателями на вертолете Ми-26 предшествовала серия полетов на вертолетах Ми-8 и Ми-6 для проверки выбранной методики посадки. Сравнение результатов математического моделирования посадок на режиме авторотации этих вертолетов показало, что наиболее близким аналогом вертолета Ми-26 по динамике посадки является вертолет Ми-8 с максимальной полетной массой 12 т, но при меньших скоростях планирования, обеспечивающих равенство вертикальных скоростей захода на посадку и приземления.
Целесообразность отработки новой техники посадок на Ми-6 полетной массой 40,5 т обосновывалась его близкими к Ми-26 характеристиками массы и габаритами, а также возможностью проведения подобия по удельной энергии, что было важно для начального периода испытаний, предусматривавшего посадки с полетными массами 36 и 40 т.
Однако выяснилось, что Ми-6 по динамике посадки, темпу увеличения общего шага при «подрыве» и другим параметрам в качестве аналога для вертолета Ми-26 не подходит. Поэтому на Ми-6 было выполнено только две посадки вместо шести запланированных. Процесс выполнения посадки, то есть время от начала маневра до приземления, у этого вертолета занимает около 17,5 секунд.
Таким образом, результаты моделирования и летных испытаний с учетом особенностей Ми-26 позволили выработать следующие рекомендации выполнения посадок:
— планирование при малых полетных массах и минимальном общем шаге на режиме установившейся авторотации выполняется на скорости 130–150 км/ч, при полетных массах 48 т и более при значениях общего шага 2–3°, обеспечивающих поддержание частоты вращения несущего винта 86–88 %;
— увеличение угла тангажа для гашения поступательной скорости начинать на высоте 50–40 м. При планировании и значениях общего шага больше 1° одновременно с увеличением угла тангажа общий шаг уменьшается до минимального;
— угол тангажа увеличивается не более чем на 10–12° от балансировочного значения на предпосадочном планировании;
— посадочный угол тангажа 10° необходимо создавать перед «подрывом» общего шага;
— «подрыв» общего шага несущего винта выполнять на высоте 18–15 метров с темпом 6-10 °/с;
— после приземления общий шаг уменьшать с таким расчетом, чтобы он достигал минимального значения при частоте вращения 50 % и менее.
После выполнения предусмотренных программой испытаний посадок на вертолетах Ми-6 и Ми-8 на режиме авторотации были выполнены посадки по-самолетному на вертолете Ми-26 с вертикальной скоростью приземления около 1,5 м/с и нормальной полетной массой (вертикальная скорость на предпосадочном планировании около 7–8 м/с).
Для выполнения первой посадки с полетной массой 36 т регулировка несущего винта была выполнена так, чтобы при минимальном общем шаге несущего винта обеспечить его обороты 86 % от номинальных на режиме установившейся авторотации.
Вторая посадка выполнялась с той же полетной массой 36 т, но при эксплуатационной регулировке несущего винта. Во время ее выполнения выяснилось, что на установившейся авторотации обороты винта ниже, а эффективность управления меньше.
Последующие посадки выполнялись с эксплуатационными регулировками несущего винта с последовательным увеличением полетной массы в каждом полете на 4 т. Посадочные массы вертолета при этом последовательно составляли 40, 44 и 48 т. В заключение были выполнены посадки на режиме авторотации с нормальной полетной массой. Все посадки выполнялись на грунтовую полосу с травяным покровом.
В результате испытаний были определены следующие параметры:
— время посадки от начала выполнения маневра для гашения поступательной скорости до момента приземления составляет 8,25-8,5 с;
— поступательная скорость приземления в первой посадке с полетной массой 36,1 т составила 68,5 км/ч, а в последующих посадках последовательно уменьшилась до 49,5 км/ч. При посадках с нормальной полетной массой скорость касания составила 53,5 и 54 км/ч;
— вертикальные скорости приземления большей части посадок с полетными массами, близкими к нормальной, составляли 1,6–1,8 м/с (рис. 2);
— вертикальные перегрузки вблизи центра тяжести вертолета при полетных массах, близких к нормальной, в среднем составили 1,7–1,9 (рис. 3);
— общий шаг несущего винта при «подрыве» увеличивался до 8,3-13,5°. При полетных массах, близких к нормальной, общий шаг увеличивался до максимума (13°30?);
— частота вращения несущего винта при минимальном общем шаге менялась в соответствии с изменением полетной массы. На авторотации при значениях общего шага больше минимального частота вращения выдерживалась в пределах 86–88 %;
— при создании угла тангажа на кабрирование 11° частота вращения несущего винта увеличивалась на 1,2–3%, а со сбросом общего шага до минимального увеличивалась на 2,5–5,5 %;
— в момент приземления минимальная частота вращения несущего винта составляла 62,5 % при полетной массе 36,1 т и 67–70 % при полетных массах, близких к нормальной;
— путевая балансировка на всех этапах от установившейся авторотации и до момента приземления практически не менялась (-0,5–1,5);
— расстояние от концов лопастей до хвостовой балки в процессе посадки, вплоть до момента остановки вертолета после пробега при минимальном значении общего шага, составляло более 2,6 м.
Использование вертолета Ми-8 в качестве аналога позволило сократить запланированное количество посадок на авторотации на вертолете Ми-26 почти вдвое. Испытания помогли выявить следующую закономерность: посадочные скорости вертолетов Ми-8 и Ми-26 при одинаковых вертикальных скоростях приземления практически пропорциональны нагрузкам на их ометаемую площадь.
Программа испытаний по посадкам на авторотации вертолета Ми-26 выполнялась экипажем МВЗ им. М.Л. Миля в следующем составе: командир Г.Р. Карапетян, второй летчик Ю.Ф. Чапаев, штурман-испытатель Б.И. Мешков, бортинженер А.Д. Денисов, ведущий инженер по летным испытаниям В.А. Изаксон-Елизаров.
После выполнения государственной программы по посадкам (всего 7 посадок) экипаж МВЗ в очень короткие сроки подготовил к работе на Ми-8 экипаж заказчика. Затем были выполнены три посадки на Ми-26 смешанным составом и две самостоятельные экипажем заказчика (командир экипажа полковник А.П. Холупов).
Вся программа летных испытаний, включая полеты на вертолетах, была закончена менее чем за полтора месяца. Во время проведения программы было выполнено 33 посадки на авторотации с выключенными двигателями на вертолетах Ми-6, Ми-8 и Ми-26, из них: 12 посадок на Ми-26, 2 посадки на Ми-6, 19 посадок на Ми-8.
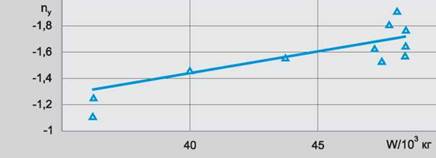
Рис. 3. Зависимость вертикальной перегрузки при посадке на режиме авторотации вертолета Ми-26 от полетной массы