EC-145
И в заключение несколько слов о городе Жуковском. Президент РФ Владимир Путин поддержал идею применить закон о свободных экономических зонах к проекту создания здесь международного выставочного демонстрационного комплекса. В нем предполагается разместить все российские конструкторские бюро, связанные с производством авиатехники. Понятно почему — с этим небольшим городком Московской области связаны многие славные страницы отечественной авиации.
На официальном закрытии выставки генеральный директор ОАО «Авиасалон» Игорь Новиков передал символический ключ от МАКС-2005 Международной выставке продукции военного назначения и Международному фестивалю пилотажных групп, который состоится в Жуковском в августе будущего года. А новый МАКС, как и положено, «прилетит» сюда через два года.
Маргарита ЛАЗАРЕВА
Ш К О Л А
Ми-26: посадка на авторотации
(Окончание, начало в № 2)

По условиям прочности предельно допустимая расчетная величина вертикальной скорости приземления Ми-26 составляет менее 3,6 м/с для нормальной полетной массы и менее 3,2 м/с для полетной массы выше нормальной при максимальной скорости касания 70 км/ч.
До начала испытаний по посадкам на авторотации были проведены наземные испытания Ми-26 на специальном стенде повторной статики для подтверждения прочности конструкции до вертикальных скоростей приземления 2,5 м/с.
Результаты моделирования посадок на режиме авторотации вертолетов Ми-6 и Ми-26 показали, что на Ми-26 возможно выполнение посадки с вертикальными скоростями 2,5–3 м/с при поступательной скорости приземления 72 км/ч, посадочная скорость вертолета Ми-6 при той же вертикальной скорости приземления составляет 50 км/ч.
Однако из-за необходимости соблюдения сроков испытания было принято решение об ограничении вертикальной скорости приземления до 2,5 м/с. Это ограничение по вертикальной скорости потребовало поиска новой техники выполнения посадок на авторотации, обеспечивающей меньшие вертикальные скорости приземления с учетом некоторого запаса, обусловленного возможными отклонениями от оптимальной техники пилотирования.
При посадке на авторотации уменьшение вертикальной скорости приземления происходит за счет энергичного увеличения общего шага («подрыва»). За счет конструктивного совершенства удельная кинетическая энергия несущего винта у вертолета Ми-26 в 1,72 раза меньше, чем у Ми-6.
Увеличение посадочной скорости у Ми-26 по сравнению с Ми-6 объясняется большими значениями вертикальной скорости установившегося планирования и меньшей эффективностью торможения. Уменьшение эффективности торможения и «подрыва» для вертолета Ми-26 является следствием большего коэффициента заполнения s и меньшего значения g.
Кроме основных ограничений по максимально допустимым поступательным и вертикальным скоростям приземления, накладывались и ограничения по максимальному посадочному углу тангажа — 10°, поскольку его предельные величины составляют 9° и 12° соответственно при полностью обжатых и необжатых амортизационных стойках главных шасси и минимально допустимой величине частоты вращения несущего винта в момент приземления 66 %, из условий прочности втулки несущего винта и обеспечения безопасных зазоров между лопастями и хвостовой балкой.
Соотношение кинетической энергии вертолета и энергии несущего винта показывает, что кинетическая энергия вертолета должна быть минимальной, а энергия несущего винта — максимальной. Этого можно добиться лишь уменьшением вертикальной скорости снижения и увеличением частоты вращения несущего винта к моменту «подрыва».
Готовясь к выполнению программы испытаний, я просматривал лекции по аэродинамике вертолетов, которые в МАИ нам блестяще читал Владимир Сергеевич Вильдгрубе. И в одной из них нашел доказательство того, что авторотация устойчива до границы срыва. А это означало, что возможно планирование на режиме самовращения при значениях общего шага больше минимального и, следовательно, при меньших вертикальных скоростях. Поначалу это предложение было встречено осторожно. Высказывались сомнения в том, что летчик сможет координировать сложные движения на самом ответственном этапе посадки.
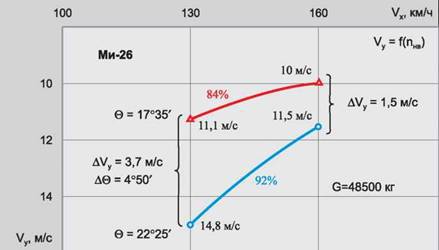
Рис. 1. Зависимость вертикальной скорости снижения на режиме авторотации от частоты вращения НБ
Моделирование посадок по предложенной технике показало, что безопасная посадка возможна при поступательной скорости приземления 73 км/ч и вертикальной 1,7 м/с с учетом всех накладываемых ограничений. Таким образом обеспечивался достаточно большой запас по вертикальной скорости приземления по сравнению с проверенной в испытаниях на прочность на наземном стенде повторной статики. Однако, хотя результаты моделирования и были обнадеживающими, предстояла проверка новой техники в летных экспериментах, естественно, сначала по отдельным составляющим, а в случае подтверждения — и при выполнении посадок на авторотации.
В первую очередь необходимо было проверить влияние частоты вращения несущего винта на вертикальную скорость снижения и определить сочетания общего шага и частоты вращения, обеспечивающие устойчивую авторотацию с меньшими значениями вертикальных скоростей.
Зависимость вертикальной скорости снижения на режиме авторотации от скорости вращения несущего винта представлена на рис. 1. Видно, что изменение скорости вращения с 92 % до 84 % дает уменьшение вертикальной скорости снижения более чем на 3 м/с при скорости планирования 130 км/ч, что уменьшает кинетическую энергию вертолета более чем на 25 %. На скорости 160 км/ч кинетическая энергия вертолета уменьшается примерно на 15 %.
Для определения величины раскрутки несущего винта и уменьшения вертикальной скорости при торможении на высоте 1000 м были выполнены режимы с уменьшением поступательной скорости со 130 км/ч (для полетной массы 37 т) и 150 км/ч (для полетной массы 49 т) до скорости 100 км/ч.
Как показали испытания, на режимах торможения увеличение оборотов несущего винта незначительно: при минимальном общем шаге и при изменении угла тангажа на кабрирование на 10° оно составляет только 1,2–3%. Вертикальная скорость уменьшается на 2,5-З м/с (меньшие значения относятся к полетной массе 37 т).
В связи с тем, что планирование на режиме авторотации для полетных масс более 48 т происходит при значениях общего шага больше минимального, изменение угла тангажа на кабрирование на 10° с одновременным уменьшением общего шага несущего винта до минимального дает больший прирост частоты вращения несущего винта (2,5–5,5 %), что увеличивает его кинетическую энергию почти на 15 %. Значительный темп уменьшения частоты вращения несущего винта в процессе «подрыва» общего шага несущего винта при малых полетных массах вертолета приводит, как это отмечалось ранее, к заметному изменению эффективности управления.
Поэтому для Ми-26 стандартная техника пилотирования при «подрыве» не могла быть рекомендована: летчик привычными, но недостаточными по величине и темпу отклонениями продольного управления (что вполне вероятно) мог выполнить посадку с вращением на кабрирование и, следовательно, с большим, чем допускается для посадки, тангажом.
В этом случае за счет вращения происходит дополнительное нагружение элементов конструкции шасси и хвостовой балки. Исходя из этих соображений посадочный угол тангажа вертолета должен быть зафиксирован перед увеличением общего шага, когда еще сохраняется обычная эффективность управления, а в процессе «подрыва» необходимо только удерживать вертолет в заданном положении, что не требует больших отклонений продольного управления.