Программа бортовой ЭЦВМ управления траекторией полета корабля Apollo
Программа бортовой ЭЦВМ управления траекторией полета ракеты-носителя Saturn V и корабля Apollo разделена на функциональные спецпрограммы в соответствии с последовательностью этапов полета на Луну: предстарт, старт, навигация, целеуказание, маневры на активных участках траектории, выставка инерциально стабилизированной платформы, вход в атмосферу, соответственно обозначаемые шифрами Р01—Р07, Р10—Р17, Р20—Р27, Р3О—Р37, Р40—Р47, Р50—Р57, Р60—Р67.
Для каждого этапа полета штурман выбирает необходимую спецпрограмму и вводит ее в бортовую ЭЦВМ, набирая соответствующий ей шифр на пульте управления.
Кроме спецпрограмм можно использовать различные алгоритмы и получить от бортовой ЭЦВМ полезную информацию о положении корабля в космическом пространстве, определить апогей и перигей орбиты, долготу, широту и высоту полета.
Программа Р40 вводится в бортовую ЭЦВМ за 5 мин до зажигания ЖРД двигательной установки служебного отсека во всех случаях, когда осуществляется маневр управления траекторией полета корабля Apollo. Точное направление вектора тяги ЖРД в начале маневра и метод осуществления маневра зависят от параметров цели, которые должны быть заранее известны.
Проблема целеуказания возникает в заданной точке космического пространства и в определенное время решается бортовой ЭЦВМ с помощью спецпрограммы Р34. Эта спецпрограмма вводится в бортовую ЭЦВМ раньше Р40. Спецпрограммой Р34 определяются потребное импульсное изменение скорости, перигейное расстояние, ожидаемый угол средней рамки кардана и выдаются экипажу заранее; кроме этого, подсчитываются расход топлива на маневр, конечная орбита и запас высоты в перигее конечной орбиты.
Перед выключением спецпрограммы Р34 и отсылкой ее в память бортовой ЭЦВМ до дальнейшего использования экипаж оценивает и одобряет полученные данные – время зажигания, продолжительность маневра и расчетный вектор промаха цели,—которые используются для расчета управления маневром.
Спецпрограмма Р40 вводится заранее, чтобы экипаж успел выполнить операции по «листу проверки», предшествующие каждому активному участку траектории.
Основное назначение спецпрограммы Р40 заключается в навигации, управлении кораблем и контроле за системами в процессе отсчета времени, зажигании и работе ЖРД, а также выключении ЖРД в конце маневра. Перед вводом спецпрограммы Р40 для работы ЦАП должны быть подготовлены следующие данные: угловая скорость, ширина зоны нечувствительности, используемые ЖРД РСУ, расчет поворота кардана ЖРД служебного отсека. Вес командного и служебного отсеков, момент инерции, момент, создаваемый ЖРД, подсчитываются и прослеживаются во время работы ЖРД.
После завершения подготовительных расчетов ЦАП подсчитывается начальное направление вектора тяги и величина необходимого изменения вектора скорости Vg; 3 компоненты вектора Vg в координатах относительно местной вертикали выдаются на приборную доску штурмана (ему предоставлено право сбросить программу, если он заметит большие ошибки в расчетах). Далее ЦАП, определяет предпочтительную ориентацию блока инерциальных измерений, при этом ось Х стабилизированной платформы направляется вдоль расчетного направления вектора тяги. Если угол средней рамки кардана превышает 45°, штурман включает программу перенастройки блока инерциальных измерений. После новой выставки блока инерциальных измерений штурман снова может включить спецпрограмму Р40.
Если закончена выставка блока инерциальных измерений ЦАП выбирает порядок маневрирования, обеспечивающий необходимое направление вектора тяги. После расчета маневра ЦАП запрашивает штурмана произвести проверку привода кардана ЖРД (для безопасности); после проверки производится триммерная подгонка углов кардана. ЦАП начинает выдавать время в минутах и секундах до начала работы ЖРД; в оставшиеся 45 сек вспыхивает сигнальная лампа и штурман, если найдет нужным, может сбросить программу. За 30 сек до зажигания спецпрограмма Р40 обращается к листу ожидающих программ, чтобы начать интегрирование по «методу среднего g». Штурман готовит двигательную установку служебного отсека, включает рубильник на главной панели и рукоятки управления на дискретный режим. ЦАП выдает команду на включение ЖРД РСУ для осадки топлива в баках. Штурман следит за изменением скорости, выдаваемой на экран-индикатор, и убеждается, что осадка происходит. За 5 сек. до зажигания штурману выдается сигнал о готовности к работе главного ЖРД и это последняя возможность сбросить выполнение маневра с работающими ЖРД.
Если принято решение продолжать полет, ЦАП включает ЖРД и одновременно изменяется режим работы ЦАП с пассивного полета на активный. ЖРД РСУ осадки топлива выключаются, как только главный ЖРД разовьет полную тягу. Экран-индикатор начинает показывать время до выключения ЖРД и Vg. Штурман следит за выполнением маневра по экрану-индикатору, убеждается в том, что оставшееся время работы ЖРД уменьшается и Vg уменьшается; по шаровому индикатору полета он следит, чтобы ошибки ориентации и скорости ориентации лежали в допустимых пределах.
Когда ЦАП определит, что целевые условия маневра достигнуты, посылается сигнал на выключение ЖРД служебного отсека, и ЦАП переключается на пассивный полет. В конце работы ЖРД на экране-индикаторе выдается остаточная скорость Vg и ее компоненты в координатах корабля. Штурман может вручную подрегулировать эти компоненты скорости с помощью рукояток управления поступательным перемещением и вращением корабля. Когда маневр закончен, ЦАП определяет параметры новой орбиты корабля, выдает эту информацию на экран-индикатор и запрашивает штурмана, перейти ли на программу холостого хода или на какую-либо другую из главных программ. [4—15, 18—20.]
3.3. Наземная сеть NASA дальней космической радиосвязи и слежения за пилотируемыми кораблями
Наземная сеть дальней космической радиосвязи NASA с пилотируемыми кораблями впервые проверялась на дальность до Луны в полете Apollo-8 в декабре 1968 г. (см. рис. 33.1).
Сеть связи использует 2 ИСЗ на стационарных орбитах, 17 наземных станций, 4 морских судна с радиооборудованием, от 6 до 8 специально оборудованных самолетов для наблюдения за полетом корабля и выполнения большого объема работы по связи, телевидению и телеметрии.
Сеть спроектирована для обеспечения непрерывной связи космонавтов с Землей от старта в процессе всего полета к Луне и до посадки.
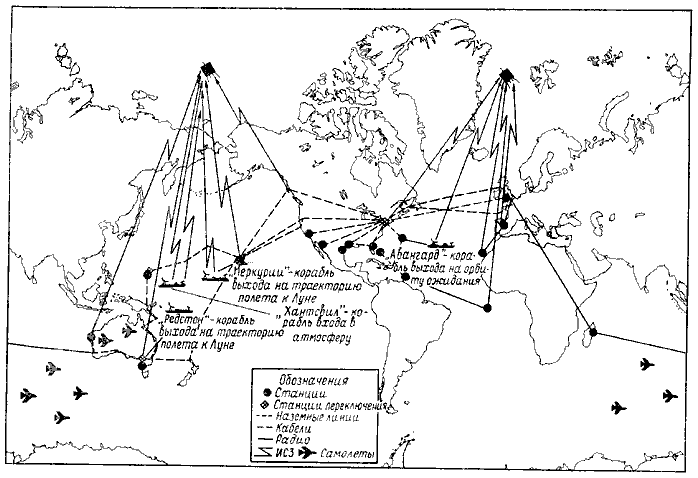
Рис. 33.1. Наземная сеть дальней космической радиосвязи NASA с пилотируемыми кораблями.
Она поддерживает тесный контакт наземного контрольного центра с кораблем Apollo и астронавтами в процессе всего полета, за исключением приблизительно 45 мин, когда Apollo, двигаясь по орбите ИСЛ, находится за Луной.
Связь с Apollo делится на 2 этапа: на первом этапе во время старта и полета по орбите ИСЗ сеть связи использует цепь станций, оборудованных 9-м антеннами; на втором этапе, когда Apollo удалится от Земли более чем на 18 000 км, связь осуществляется более мощными и более точными антеннами диаметром 26 м и 46 м.
В зависимости от азимута старта, Apollo начинает работать со станциями с 9-м антеннами на о. Меритт, Багамских о-вах, Бермудах, корабле «Авангард», Канарских о-вах, в Карнарвоне (Австралия), Гавайских о-вах, втором корабле слежения, Гуаме, Мексике и Корпус Кристи (шт. Техас).
Для выхода на траекторию полета к Луне Центр управления полетом посылает сигнал через одну из наземных станций или через один из кораблей слежения в Тихом океане. Когда Apollo возьмет курс на Луну, работа ЖРД отслеживается кораблем и самолетами. Самолеты осуществляют релейную связь для передачи голоса астронавтов и другой информации в Хьюстон.
Когда Apollo достигнет высоты 18 000 км, слежение осуществляется антеннами, диаметром 46 м, которые установлены на земном шаре через 120°—вблизи Мадрида (Испания), в Голдстоуне (Калифорния) и Канберре (Австралия). При таком расположении по крайней мере одна антенна все время в поле обзора имеет Луну.