Пассивирование
Пассиви'рование, пассивация металлов, переход поверхности металла в пассивное состояние, при котором резко замедляется коррозия . П. вызывается поверхностным окислением металлов. Практическое значение П. исключительно велико, так как все конструкционные металлы без их самопроизвольного П. подвергались бы быстрой коррозии не только в агрессивных химических средах, но и во влажной земной атмосфере или пресной воде.
Если погрузить металл, склонный к П., в неокислительный водный раствор электролита, подключить его к источнику тока, позволяющему задавать любые значения потенциала (так называемому потенциостату) и записать зависимость плотности тока растворения металла от задаваемого потенциала, то получится поляризационная кривая, близкая к представленной на рисунке. Кривая показывает, что П. металла начинается при потенциале пассивации Еп и критической плотности тока iп . С увеличением потенциала от Еп до Епп (потенциала полной пассивации) плотность тока не увеличивается, а снижается в результате П. иногда в 104 —105 раз (до iпп ) и далее сохраняется почти без изменений вплоть до потенциала перепассивации Епер .
Наблюдаемое затем новое ускорение растворения связывают с перепассивацией, или транспассивным состоянием. Интервал от Епп до Е пер называют областью пассивного состояния. В присутствии ионов Cl- , Br- , I- местное сильное растворение («питтинг») некоторых пассивных металлов начинается ещё при потенциале Епит < Епер .
Все перечисленные величины являются важными характеристиками поведения металлов и при коррозии под действием окислителей. Так, металл коррелирует с минимальной скоростью (эквивалентной плотности тока в полностью пассивном состоянии i пп ) тогда, когда окислительно-восстановительный потенциал среды Е о-в удовлетворяет условию Епп < Е о-в < Епер . Для того чтобы П. было самопроизвольным (при отсутствии внешних источников тока), скорость восстановления окислителя при Еп должна быть не меньше iп . Например , разбавленные растворы азотной кислоты в отношении хрома удовлетворяют обоим этим условиям, а в отношении железа —только первому. Соответственно Cr в них пассивируется сам, a Fe только может сохранять пассивное состояние, созданное каким-то способом ранее. Поскольку для Cr i п и i пп в сотни раз меньше, чем для Fe, а Епп и Епер — на 0,4—0,5 в отрицательнее, Cr несравненно устойчивее Fe в слабо окислительных средах, но вследствие перепассивации значительно сильнее разрушается в сильных окислителях (дымящей азотной кислоте, кислотах с добавками перманганатов, хроматов и др.). Сильное повышение концентрации кислоты или щёлочи обычно ведёт к увеличению iп и i пп , и в таких средах устойчивы лишь некоторые металлы. Среди них наибольшее значение имеют Cr, Ni и богатые ими сплавы, Ti, Zr. В нейтральных средах к П. в той или иной мере склонна большая часть металлов. В неводных растворах П. часто оказывается возможным только в присутствии влаги. В теории П. важная роль отводится как адсорбции кислорода, так и образованию окисных слоев.
Перепассивация вызывается образованием высших кислородных соединений металла, которые либо растворяются целиком, давая анионы (CrO4 2- ), либо отдают в раствор свои катионы, распадаясь с выделением кислорода (NiO2 ). Источниками кислорода, участвующего в образовании пассивирующих слоев, могут быть некоторые окислители (H2 O2 , HNO3 ). П. могут способствовать анионы, дающие с металлом труднорастворимые соли или смешанные окислы. Однако наиболее универсальным источником пассивирующего кислорода является химически или электрохимически взаимодействующая с металлом вода.
В технике термин «П.» означает также специальную химическую или электрохимическую обработку металла в подходящем растворителе, повышающую стойкость его исходного пассивного состояния (П. алюминиевой посуды в 30%-ной HNO3 , цинковых покрытий в хроматных растворах и т.д.). Вещества, главным образом окислители, с помощью которых производится П., называются пассиваторами.
Лит.: Томашов Н. Д., Чернова Г. П., Пассивность и защита металлов от коррозии, М., 1965; Скорчеллетти В. В., Теоретические основы коррозии металлов, Л., 1973; Новаковский В. М., Обоснование и начальные элементы электрохимической теории растворения окислов и пассивных металлов, в сборнике: Коррозия и защита от коррозии, т. 2, М., 1973.
В. М. Новаковский.
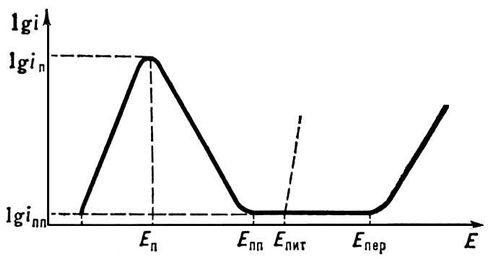
Рис. к ст. Пассивирование.
Пассивная конструкция
Пасси'вная констру'кция, модель предложения, формируемая переходными глаголами; один из видов номинативной конструкции .
Пассивная радиолокация
Пасси'вная радиолока'ция, радиолокация объекта по его собственному излучению. Отсутствие излучения зондирующего сигнала повышает скрытность работы, существенно затрудняет обнаружение пассивных радиолокационных станций (РЛС) и создание им помех (см. Радиолокационные помехи ). Различают П. р. объектов с искусственным (радиопередатчики различного назначения) и естественным (тепловым) излучением радиоволн. Приём пассивной РЛС радиоволн, излучаемых земной и водной поверхностями, используется для снятия радиолокационной карты местности в навигационных целях или обзора местности с целью её разведки, а также для обнаружения отдельных объектов с интенсивным радиоизлучением. Такая РЛС имеет радиоприёмник и антенну с узкой, иглообразной диаграммой направленности, сканирующей в заданном секторе. Принятые сигналы после обработки в приёмнике поступают на электроннолучевой индикатор, у которого развёртка изображения синхронизирована с перемещением диаграммы направленности антенны. На экране индикатора получают картину теплового радиоизлучения местности (рис. 1 ). Кроме того, пассивные РЛС используются для обнаружения и определения координат воздушно-космических объектов, в частности баллистических ракет на активном участке полёта, и угловых координат внеземных источников радиоизлучения. Последнее служит навигационным целям определения широты и долготы точки размещения РЛС.
В отличие от так называемой активной радиолокации, П. р. не позволяет найти дальность лоцируемого объекта по данным приёма сигналов только в одном пункте. Для полного определения координат объекта необходимо совместное использование нескольких (³2) РЛС, разнесённых на некоторое (известное) расстояние. Различают 3 способа определения координат радиоизлучающих объектов с помощью П. р.: угломерный, разностно-дальномерный и угломерно-разностно-дальномерный.
При угломерном способе определяют только направление на лоцируемый объект — при помощи двух (или более) пассивных РЛС (рис. 2 ), разнесённых на расстояние l . Если объект и обе РЛС расположены в горизонтальной (вертикальной) плоскости, достаточно найти 2 азимута (2 угла места), а определение дальности осуществляется решением треугольника. Для определения координат объекта в общем случае необходимо измерить не менее 3 угловых координат. Измерив 2 азимута и один угол места, дальность до объекта от первой РЛС можно найти по формуле: